Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Nível 1
Atendeu a determinados critérios de desempenho e demonstra forte potencial no marketplace.
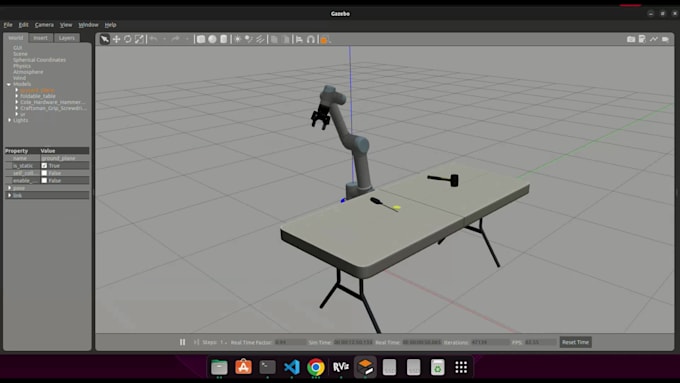
Vou ajudar a simular braços robóticos com planejamento de movimento e controle no ROS2 Gazebo. Posso entregar soluções personalizadas de acordo com suas necessidades.
Por que me escolher?