Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Engenheiro de Design, Fabricação
Nível 2
Atendeu a critérios de alto desempenho e tem um histórico comprovado de atendimento às expectativas dos clientes.
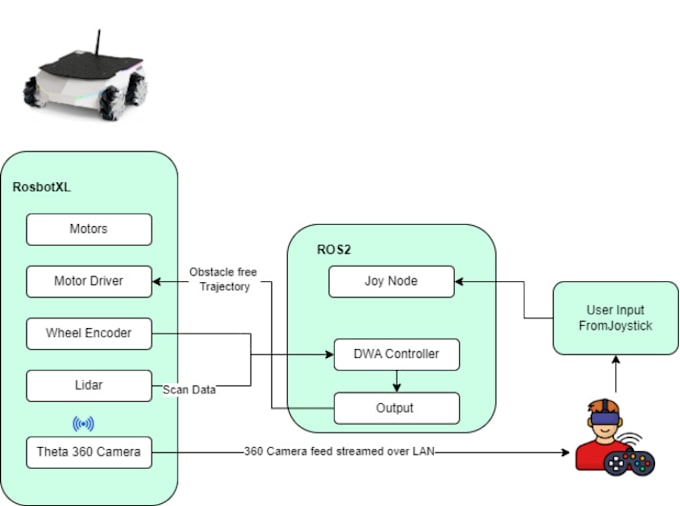
Está construindo um robô móvel ou sistema autônomo e precisa de suporte especializado com ROS 2? Você veio ao lugar certo! Eu me especializo em desenvolver projetos avançados de robótica usando ROS 2, com foco em:
O que eu ofereço:
Pilha de navegação (Nav2)
Precisa que seu robô navegue autonomamente por mapas, evite obstáculos ou siga pontos de passagem? Eu configurarei e ajustarei toda a pilha Nav2, incluindo mapeamento, localização, planejamento de rotas e árvores de comportamento.
Cinemática de robôs
Vou implementar e validar cinemática direta e inversa para bases móveis diferenciais, omnidirecionais ou personalizadas.
Controladores personalizados em Python
Desde escrever nós ROS 2 em Python até criar controladores personalizados para planejamento de movimento ou fusão de sensores, posso adaptar soluções às suas necessidades robóticas únicas.
Simulação (Gazebo, RViz)
Teste seu robô na simulação antes de passar para o mundo real. Eu ofereço suporte para Gazebo/Ignition, RViz2 e outros.
Vamos construir seu robô juntos!
Envie uma mensagem antes de fazer seu pedido para que eu possa entender suas necessidades e entregar a melhor solução.
Atenciosamente,
Syed Huzaifa




Plataforma:
Raspberry Pi
Sensores:
Acelerômetro
•
Camera
•
Lidar
•
Posição
•
Localização
Especialidade:
Microcontroladores
•
IoT
•
ROS
•
AI
•
Programação