Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Especialista em Marketing Digital, Desenvolvedor de Jogos, Designer Gráfico
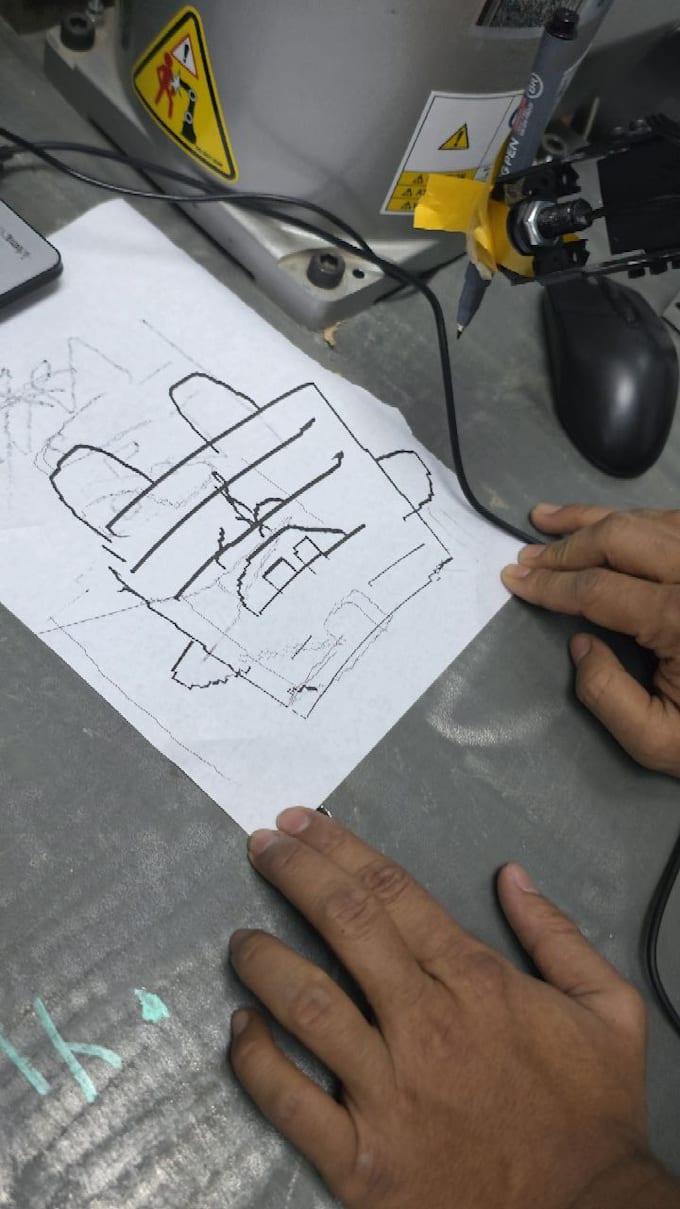
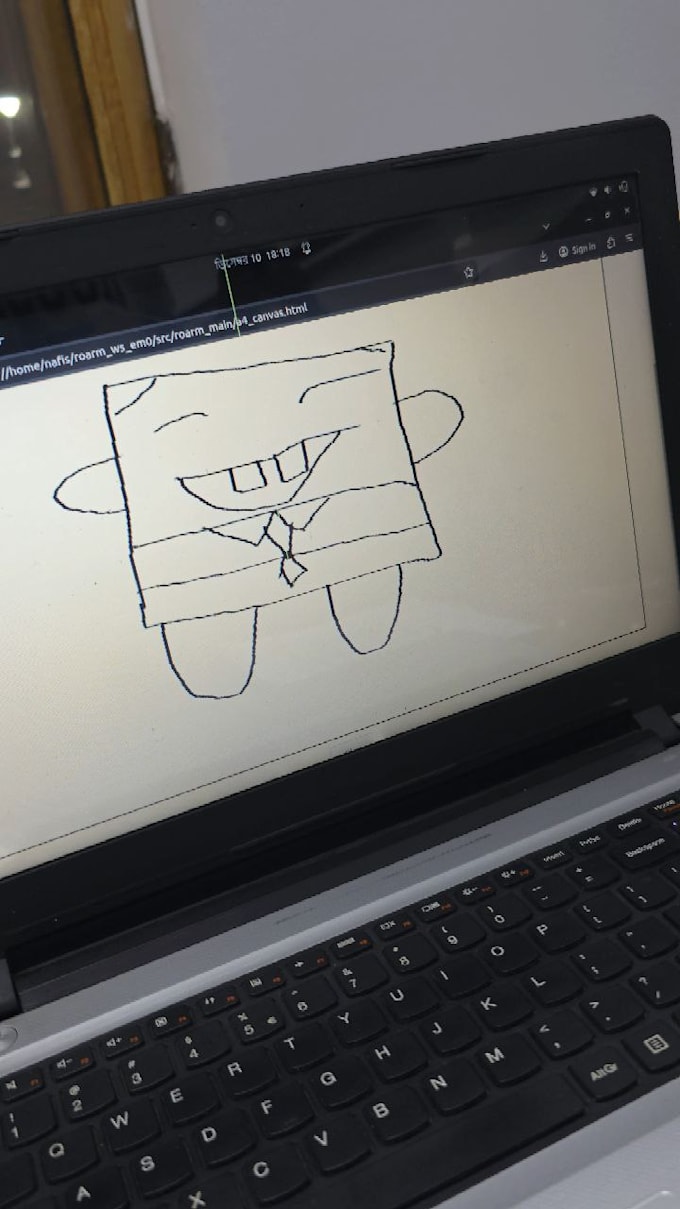
Está tendo problemas com ROS2? Posso ajudar a diagnosticar e corrigir erros de compilação, problemas de pacote, problemas de comunicação DDS, erros na simulação Gazebo, problemas de visualização no RViz, configurações do Nav2 e desafios na integração do robô. Trabalho com ROS2 Humble e Jazzy, Ubuntu Linux, Python, C++, TurtleBot3 e robôs Unitree. Envie seus logs, capturas de tela ou arquivos do projeto, e ajudarei a colocar seu sistema novamente em funcionamento.



Plataforma:
Raspberry Pi
Sensores:
Temperatura
•
Acelerômetro
•
Infravermelho
•
Camera
•
Lidar
Tradução automática
Quais distribuições do ROS2 você suporta?
Eu principalmente suportam ROS2 Humble e Jazzy. Também posso ajudar com Foxy e Galactic para tarefas de depuração e manutenção.
Quais informações você precisa antes de começar?
Por favor, forneça: Versão do ROS2 Versão do Ubuntu Logs de erro ou saída do terminal Capturas de tela (se aplicável) Código fonte do projeto ou link do repositório Descrição do comportamento esperado Quanto mais informações você fornecer, mais rápido poderei diagnosticar o problema.
Você pode ajudar com problemas no Gazebo e RViz?
Sim. Posso solucionar: Erros na simulação Gazebo Problemas ao carregar o modelo do robô Problemas com plugins Problemas de visualização no RViz Erros na árvore TF Problemas na exibição de sensores
Você consegue resolver problemas de rede do ROS2 e comunicação DDS?
Sim. Posso ajudar com: Comunicação multi-máquina Configuração do ROS_DOMAIN_ID Problemas de descoberta Configuração do middleware DDS Problemas de comunicação entre robô e PC