Ver categorias
Explorar
Fiverr Pro
Português
$
USD






Tradução automática
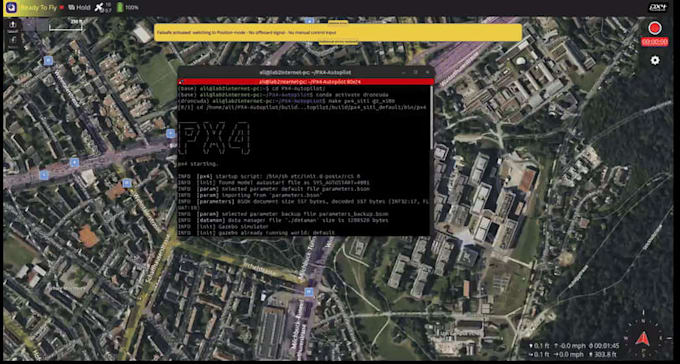
Vou criar simulações realistas de drones usando PX4, Gazebo e ROS para um ou vários drones. Minhas simulações incluem navegação autônoma, controle baseado em IA e rastreamento de múltiplos drones, permitindo que você teste algoritmos de voo de forma segura e eficiente.
Seja para um voo básico de um drone, rastreamento de múltiplos drones ou um ambiente de simulação completo controlado por IA, posso entregar uma aplicação de desktop pronta para usar com código fonte.
O que você recebe com meu serviço:
Ideal para pesquisadores, desenvolvedores e hobbyistas que querem testar algoritmos de drones, projetos de robótica ou navegação por IA em um ambiente virtual seguro.
Palavras-chave incluídas naturalmente: PX4, Gazebo, ROS, Simulação de Drones, IA em Robótica, Rastreamento de Múltiplos Drones, controle por IA
InjectAIsolution
Idiomas
Tradução automática
Tradução automática
O que você precisa de mim para começar?
Por favor, forneça o tipo de drone, quantidade de drones, detalhes do ambiente de simulação e quaisquer requisitos específicos de cenário.
Você consegue simular múltiplos drones ao mesmo tempo?
Sim, simulação de múltiplos drones com navegação autônoma e rastreamento está disponível nos pacotes Padrão e Premium.
Você fornece o código-fonte?
Sim, todos os pacotes Premium incluem código fonte para que você possa modificar ou expandir a simulação.
Você consegue integrar controle por IA em simulações existentes?
Com certeza! Ofereço refinamento de modelos de IA e integração com aplicativos existentes no pacote Premium.
Quanto tempo demorará a entrega?
O tempo de entrega depende do pacote: Básico – 3 dias, Padrão – 5 dias, Premium – 7 dias.