Ver categorias
Explorar
Fiverr Pro
Português
$
USD
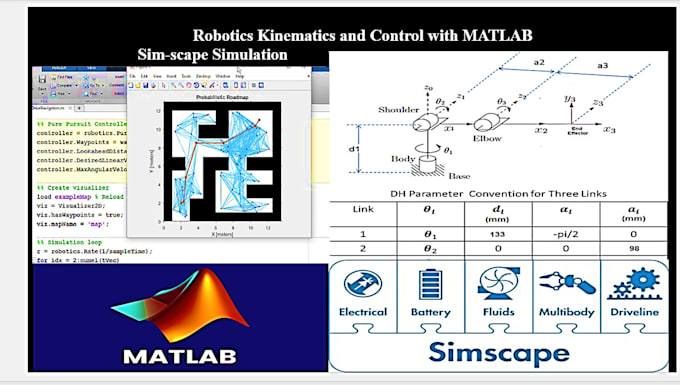
Sou totalmente especialista em projetos e pesquisas sobre cinemática de robótica. Vou te ajudar com a análise de cinemática e dinâmica de braços robóticos com múltiplos graus de liberdade
A cinemática inclui
Avaliação do grau de liberdade
A dinâmica inclui
Software:
Por favor, se tiver alguma dúvida, entre em contato comigo antes de fazer o pedido