Ver categorias
Explorar
Fiverr Pro
Português
$
USD




Tradução automática
Antes de você derrubar um drone personalizado de $5.000 ou correr o risco de danificar um protótipo físico, precisa de uma simulação precisa em termos de física.
Testar seu código em um ambiente virtual é a maneira mais segura e econômica de desenvolver robótica. Garante zero risco ao seu hardware e economiza milhares em custos de reparo e substituição.
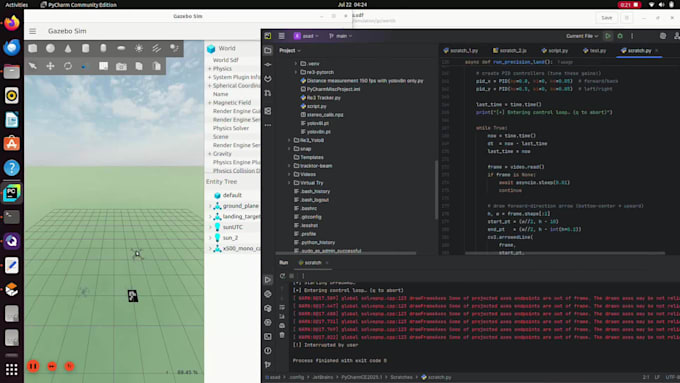
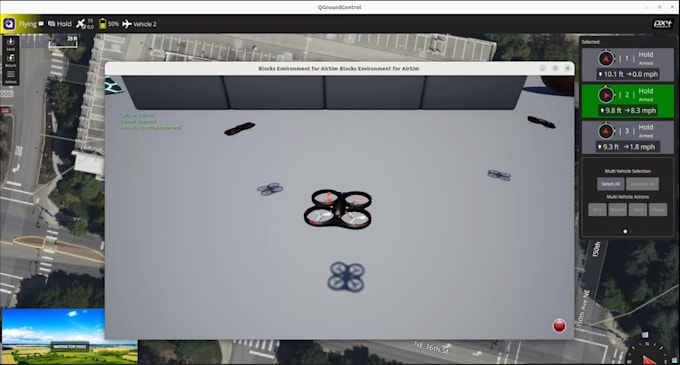
Sou engenheiro de robótica e aeroespacial, criando ambientes de teste personalizados no Gazebo e Unity. Seja para ajudar a converter um arquivo CAD em um URDF funcional ou criar um ambiente 3D complexo com física avançada e controle/integração de navegação completa, posso construir exatamente o que seu projeto precisa.
O que posso fazer pelo seu projeto:
Ferramentas: Gazebo, Unity3D, ROS/ROS2, Python, C++, SolidWorks.
AI Developer, Robotics Engineer, FPV Drone Design Expert
Idiomas
Tradução automática
Tradução automática
Que tipos de projetos são mais indicados para suas simulações?
São perfeitas para testar rovers autônomos (UGVs), drones personalizados (UAVs) e braços robóticos. Se você precisa testar stacks de navegação ROS/ROS2, algoritmos de visão computacional ou verificar restrições físicas antes de montar hardware real, essas simulações são a escolha ideal.