Implante uma navegação confiável e autônoma na sua plataforma móvel. Sou especialista em configurar, ajustar e depurar o ROS 2 Navigation Stack (Nav2) e pipelines de SLAM para garantir uma localização robusta e um planejamento de rota suave.
Escopo técnico:
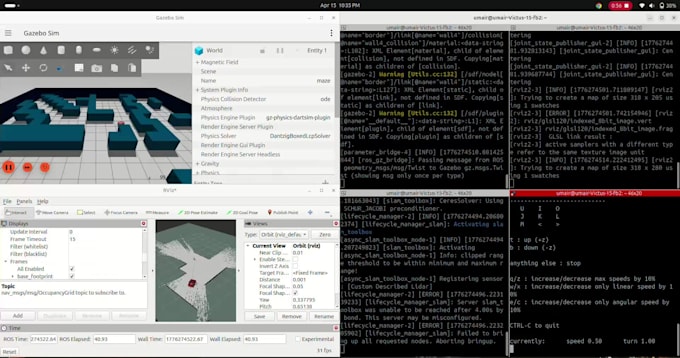
- Mapeamento & SLAM: Configuração do SLAM Toolbox ou Cartographer para geração de grade de ocupação 2D de alta resolução.
- Ajuste de localização: Otimização dos parâmetros do AMCL (Localização Monte Carlo Adaptativa) para evitar dispersão de partículas e deriva.
- Configuração do costmap: Ajuste dos costmaps global e local, raios de inflação e camadas de obstáculos para evitar colisões de forma segura.
- Planejamento de rota & controle: Ajuste da árvore de comportamento junto com configurações personalizadas para planejadores e controladores (Dijkstra, DWA ou TEB Local Planner).
Compatível com configurações tanto do ROS 2 Humble quanto do Jazzy. Por favor, forneça detalhes do seu URDF ou ambiente Gazebo antes de começar.