Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Soluções de IA, DeepStream e Robótica otimizadas para seus dispositivos de borda
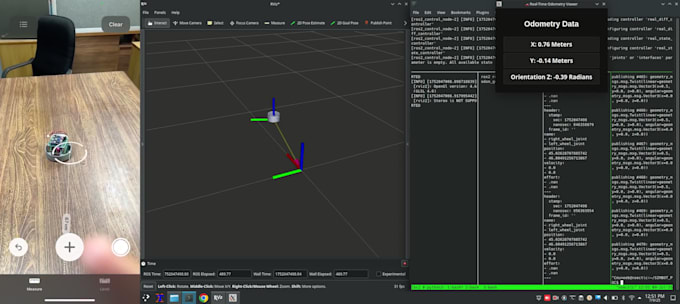
Você está procurando integrar IA na borda para sua aplicação de robótica? Eu me especializo em construir soluções de IA de borda aceleradas por hardware usando ROS2, perfeitamente adaptadas para sistemas robóticos em tempo real e com baixa latência.
Como especialista em robótica e ROS2, vou ajudar você a implantar aplicações robóticas inteligentes diretamente em hardware de borda como Jetson Nano, Xavier, Raspberry Pi, Coral TPU e outros, possibilitando inferência offline, fusão de sensores e controle em tempo real usando modelos avançados de IA.
O que eu ofereço:
Tecnologias que uso:
Ideal para:


Plataforma:
NVIDIA Jetson
Sensores:
Acelerômetro
•
Ultrassônico
•
Infravermelho
•
Camera
Tradução automática
Q1: Quais plataformas de hardware você suporta?
A: Suporto uma ampla variedade de dispositivos de borda, incluindo NVIDIA Jetson Nano/Xavier, Raspberry Pi 4, Intel NUC, Coral Dev Board e outras plataformas ARM/x86.
Q2: Você consegue implantar modelos de IA como YOLO ou estimativa de pose em dispositivos de borda?
A: Sim! Posso otimizar e implantar modelos como YOLOv5, YOLOv8, MoveNet e CNNs personalizadas usando TensorRT, ONNX ou TensorFlow Lite para inferência eficiente na borda.
Q3: Você vai integrar o modelo de IA em um nó ROS2?
A: Com certeza. Vou criar ou modificar nós ROS2 para envolver seu modelo de IA, publicar resultados de inferência e integrá-lo ao seu pipeline de controle robótico.
Q4: Você fornece interface de hardware, como controle de motores ou leitura de sensores?
A: Sim, posso fazer interface com seu hardware (por exemplo, motores, câmeras, LIDAR, IMUs, etc.) usando drivers personalizados ou padrão.
Q5: Já tenho um modelo de IA treinado — você consegue implantá-lo no meu hardware?
A: Com certeza! Basta compartilhar o arquivo e o formato do modelo, e eu cuidarei da conversão, otimização e integração com ROS2 para implantação na borda.