Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Desenvolvedor sênior de firmware
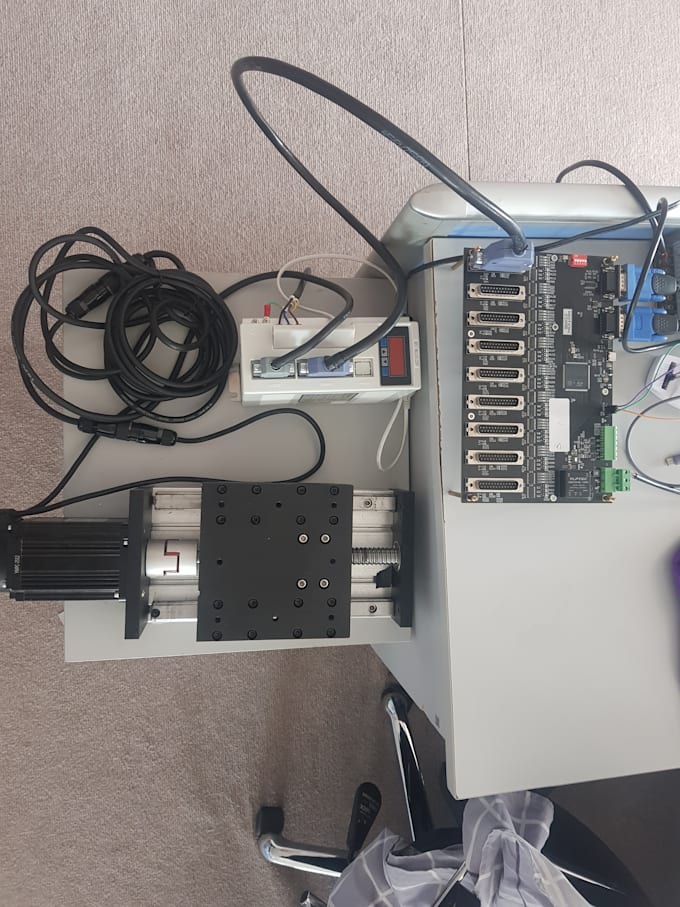
Transforme Telemetria em Movimento Real Desenvolvimento Profissional de Controlador Multi-Eixo
Quer um rig de movimento para sim racing que realmente pareça com o real? Eu projeto e construo o cérebro embarcado que converte telemetria do jogo em movimento físico preciso e sincronizado, usando a mesma engenharia de plataformas de movimento profissionais de alta qualidade.
Sou engenheiro de sistemas embarcados especializado em controle de servos multi-eixo em tempo real no STM32, desde um único eixo de prova de conceito até uma plataforma de movimento completa de 9-DOF.
️ O que eu crio
Firmware de controle de movimento em tempo real
Bucle de controle determinístico de 500 Hz no STM32 (Cortex-M4 / M7, por exemplo, STM32F407, STM32H743)
Sinal de saída de servo Pulse + Direção multi-eixo sincronizado, sem desvio de fase
Pipeline de telemetria: filtragem de picos, suavização, limitação de aceleração/desaceleração, escalonamento por eixo
Integração com SimHub
Parsing de protocolo serial personalizado com sincronização de quadro robusta
Mapeamento plug-and-play para suspensão, surge, perda de tração e efeitos de tensão na correia
Modos de controle mistos em um controlador: seguimento de posição, feedforward de vibração e controle de tensão/força



Plataforma:
STM32
Sensores:
Temperatura
•
Localização
Especialidade:
RTOS
•
IoT