Ver categorias
Explorar
Fiverr Pro
Português
$
USD
Engenheiro de Software de Robótica
Você está construindo um robô ou sistema autônomo e precisa de uma solução completa de robótica, não apenas código isolado?
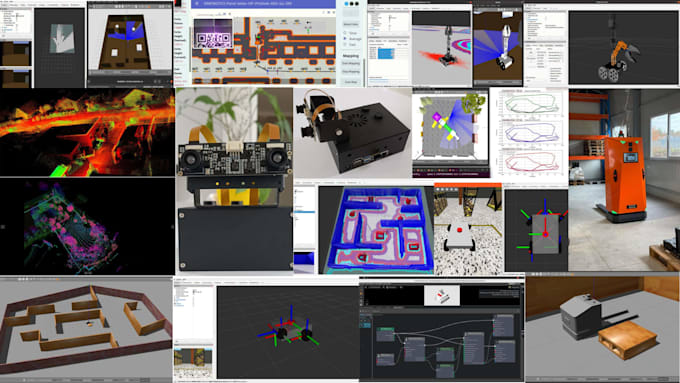
Eu ofereço soluções de software de robótica de ponta a ponta, focando no sistema completo do robô desde percepção e localização até navegação, controle, simulação e integração de sistemas. Meu objetivo é ajudar você a construir um robô confiável, bem estruturado e escalável, seja na fase de protótipo ou na implantação em hardware real.
Trabalho com robôs reais e simulações, integrando sensores como LiDAR, IMU, câmeras e encoders, projetando sistemas de movimento e navegação, criando simulações para testes e depuração de problemas complexos do mundo real. ROS2 é uma das ferramentas que uso, mas meu foco sempre é resolver problemas de robótica como um sistema completo, não apenas nós individuais.
Este serviço é adequado para startups, empresas, pesquisadores e estudantes que precisam de suporte profissional para projetos de robótica, robôs autônomos ou stacks de software de robô complexos.
Você receberá soluções limpas, documentadas, explicações claras e orientações práticas personalizadas para seu robô e caso de uso.
Por favor, envie uma mensagem antes de fazer o pedido para que possamos discutir seu robô, objetivos e a melhor abordagem.


Tradução automática
Em que tipo de projetos de robótica você trabalha?
Trabalho em uma ampla variedade de projetos de robótica, incluindo robôs autônomos, robôs móveis, plataformas de pesquisa e sistemas robóticos personalizados. Meu foco é fornecer soluções completas de robótica que abrangem percepção, localização, navegação, controle, simulação e integração de sistemas.
Você trabalha apenas com ROS2?
Não. ROS2 é uma das ferramentas que uso, mas meu foco principal é o design geral de sistemas de robótica e resolução de problemas. Escolho a melhor abordagem e ferramentas com base nas necessidades do seu robô e projeto.
Você pode trabalhar com robôs reais ou só com simulações?
Trabalho com ambos. Posso apoiar desenvolvimento baseado em simulação, assim como hardware real, incluindo integração de sensores, controle e depuração no mundo real.
Você pode ajudar a melhorar ou consertar um sistema de robótica existente?
Sim. Frequentemente ajudo clientes a depurar, otimizar e melhorar softwares de robótica existentes, incluindo problemas de desempenho, instabilidade e integração.
Você fornece documentação e explicações?
Sim. Todas as soluções entregues incluem documentação clara e explicações para que você entenda como o sistema funciona e possa mantê-lo no futuro.
Devo entrar em contato com você antes de fazer um pedido?
Sim, por favor. Enviar mensagem antes de pedir ajuda me ajuda a entender seu robô, objetivos e restrições, assim posso sugerir a melhor solução e plano de entrega.